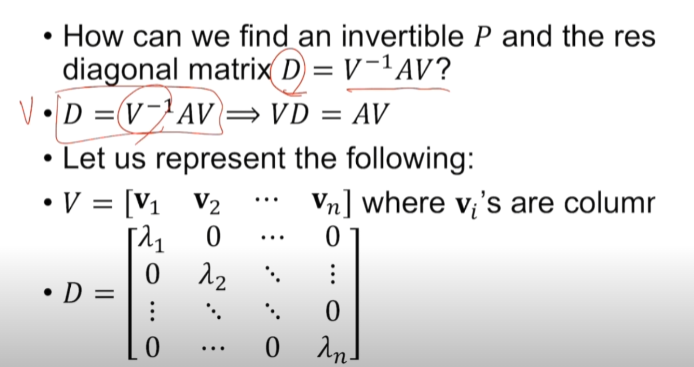
Orthogonalization이 가능한 상태를 생각해봅시다. n개의 선형독립적인 Eigenvector를 사용할 수 있는 상황에서, 다음과 같이 $D = V^{-1}AV$에서 $D$에도 $V$, $V^{-1}$ 그리고 $A$에도 $V$, $V^{-1}$을 곱합니다. Diagonal 하다는 것은 V의 역행렬이 존재한다는 것입니다. $VDV^{-1} = AV^{-1}VV{-1}V$ $VDV^{-1} = A$ - 다음과 같이 나오게 됩니다. 이것을 고유값 분해(Eigendecomposition)이라고 합니다. 주어진 matrix를 여러 matrix의 곱으로 나타내는 것을 matrix에 대한 decomposition이라고 말합니다. 이 분해를 하기 위한 조건으로 V는 invertible 한 matrix이어야 합..